
Многие из вас наверняка знают и видели гаджет под названием «Бесполезная коробка».
Но коробочка эта, вовсе не бесполезная, игра с ней дает немало положительных эмоций.
Решив позабавить своих детей, друзей и знакомых, я сделал URoboBox.
Это моя версия легендарной коробки.
Наткнулся в сети на такую штуку:
https://www.youtube.com/watch?v=mOPPas21Kbk
И еще вариант продвинутый вариант от LEGO:
В интернете также нашел инструкцию как собрать самостоятельно URoboBox – бесполезную роботизированную коробку.

URoboBox – Useless Robotic Box (Бесполезная Роботизированная Коробка).
Коробочка получилась простая, с минимальной начинкой доступной каждому. Для тех, кто хочет сделать такую коробку, прилагаю подробную инструкцию по сборке и все необходимые файлы. Для начала давайте посмотрим что получилось.
URoboBox в действии:
URoboBox может работать в двух режимах, случайный выбор движений и по порядку.
Коробочка имеет 7 движений для отключения тумблера, можно добавлять свои движения.
Если рычаг по каким-то причинам не может выключить тумблер, то после трех попыток коробочка переходит в режим ожидания.
Работа продолжится после отключение тумблера вручную.
Далее идет часть для тех кто желает собрать такую коробочку самостоятельно.
Работа URoboBox изнутри:
Корпус и рычаг вырезаны лазером из фанеры толщиной 4 мм.
Вы можете использовать любой другой материал, например, пластик, оргстекло.
Но толщина материала не должна превышать 4 мм, в противном случае, вам придется изменить чертежи.
Чертежи нарисованы в программе CorelDRAW X6.
Следуйте инструкции и у вас всё получится.
ВНИМАНИЕ: Вовремя сборки внимательно смотрите на фотографии и располагайте детали именно так, как они расположены на фото.
Необходимые компоненты:
- Плата Arduino. Я использую Arduino Mega, вы можете использовать любую другую.
- Тумблер с двумя положениями. Диаметр втулки с резьбой не должен превышать 6 мм.
- Серво. Я использую TowerPro g9. Если вы будете использовать другие серво, вам придется изменить чертежи крепления серво.
- Элементы питания.
- Супер клей. Маленькие тюбики, желательно гель.
- Шесть маленьких саморезов диаметром до 2.5 мм.
- Сверло 2 мм, 1 мм. Дрель или шуруповерт.
Инструкция по сборке:
Крепление для Arduino.
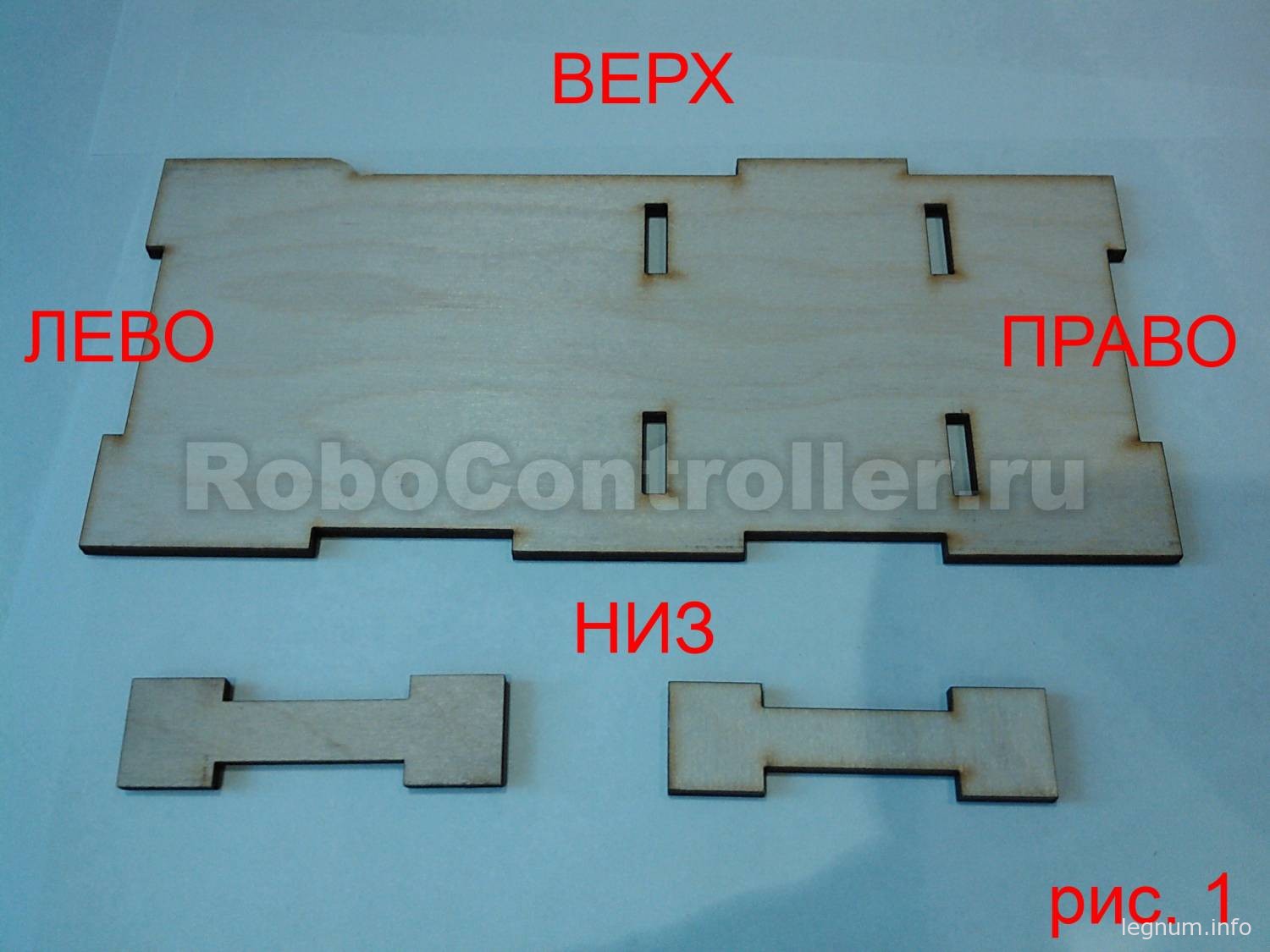
- Возьмите необходимые детали. Расположите их точно также как на фото (рис. 1).
- Переверните боковую стенку, поставьте детали крепления (гантельки) в прямоугольные отверстия (рис. 2).
- Сделайте отметки с двух сторон у каждой «гантельки», примерно посередине, между прямоугольными отверстиями (рис. 2 и рис. 3).
- Поочередно, установите «гантельки» с обратной (внутренней стороны) и просверлите отверстия (сверло 2 мм) в местах указанных точками на рисунке (рис. 3). Сверлите таким образом, чтобы сверло вошло в стенку «гантельки» прямо по центру. Диаметр сверла зависит от диаметра самореза.
- Закрепите «гантельки» саморезами (рис. 4, рис. 5).
- Возьмите пластинку для крепления Arduino. Приложите к ней плату так, чтобы совпали отверстия для креплений. Отметьте где будет находиться гнездо USB и куда оно направлено (рис. 6).
- Нанесите клей на паз «гантелек» (рис. 7), приложите пластину крепления Ардуино к «гантелькам» и дождитесь пока она приклеится.



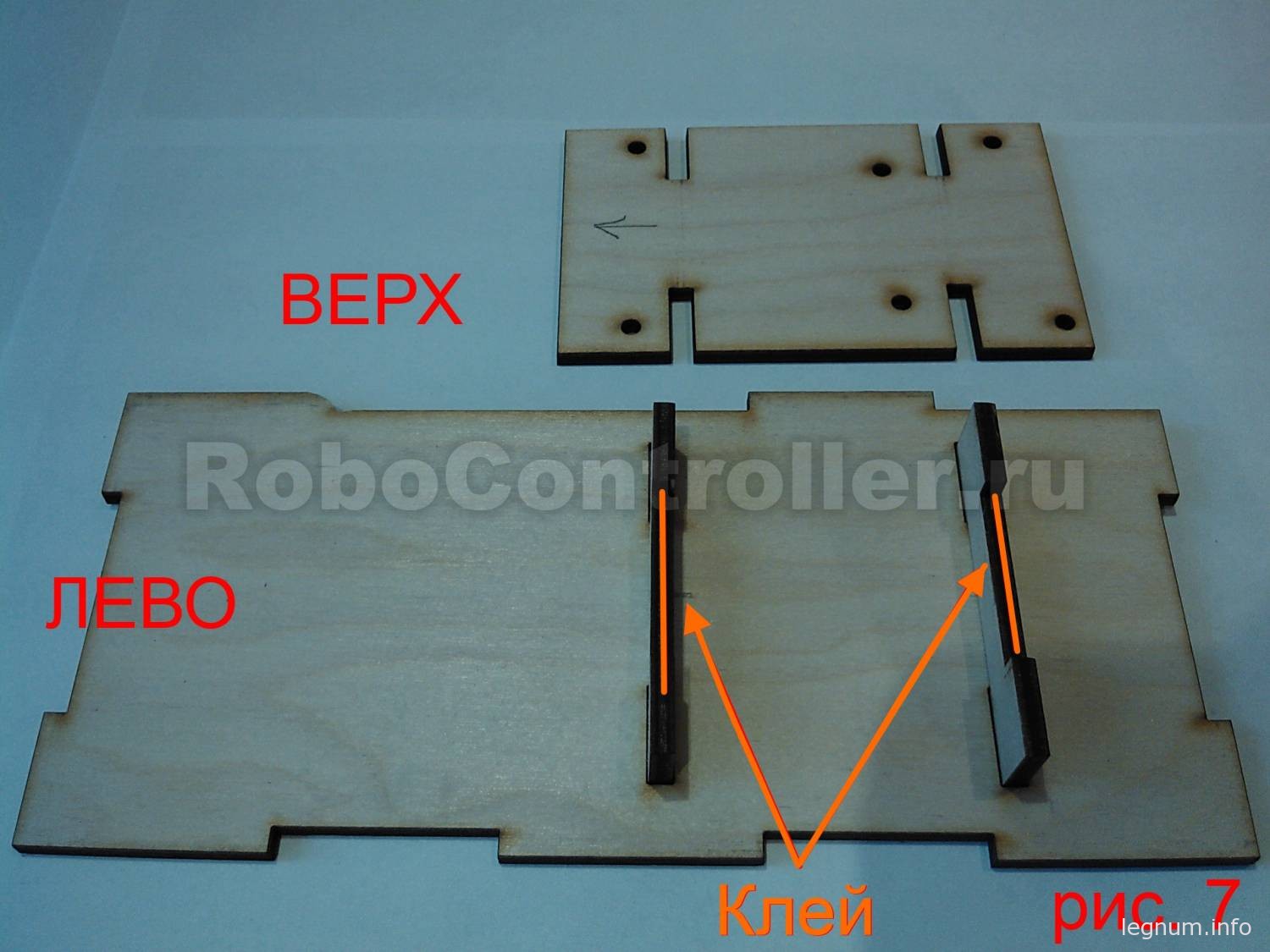


Вот что у вас должно получиться:
Корпус
- Разложите детали так, как показано на фото (рис. 8). Синими стрелками указаны основные элементы деталей, убедитесь, что ваши детали лежат также.
- Склейте скотчем: дно, левый торец, заднюю стенку и правый торец (видео 2). Соблюдайте расположение деталей.
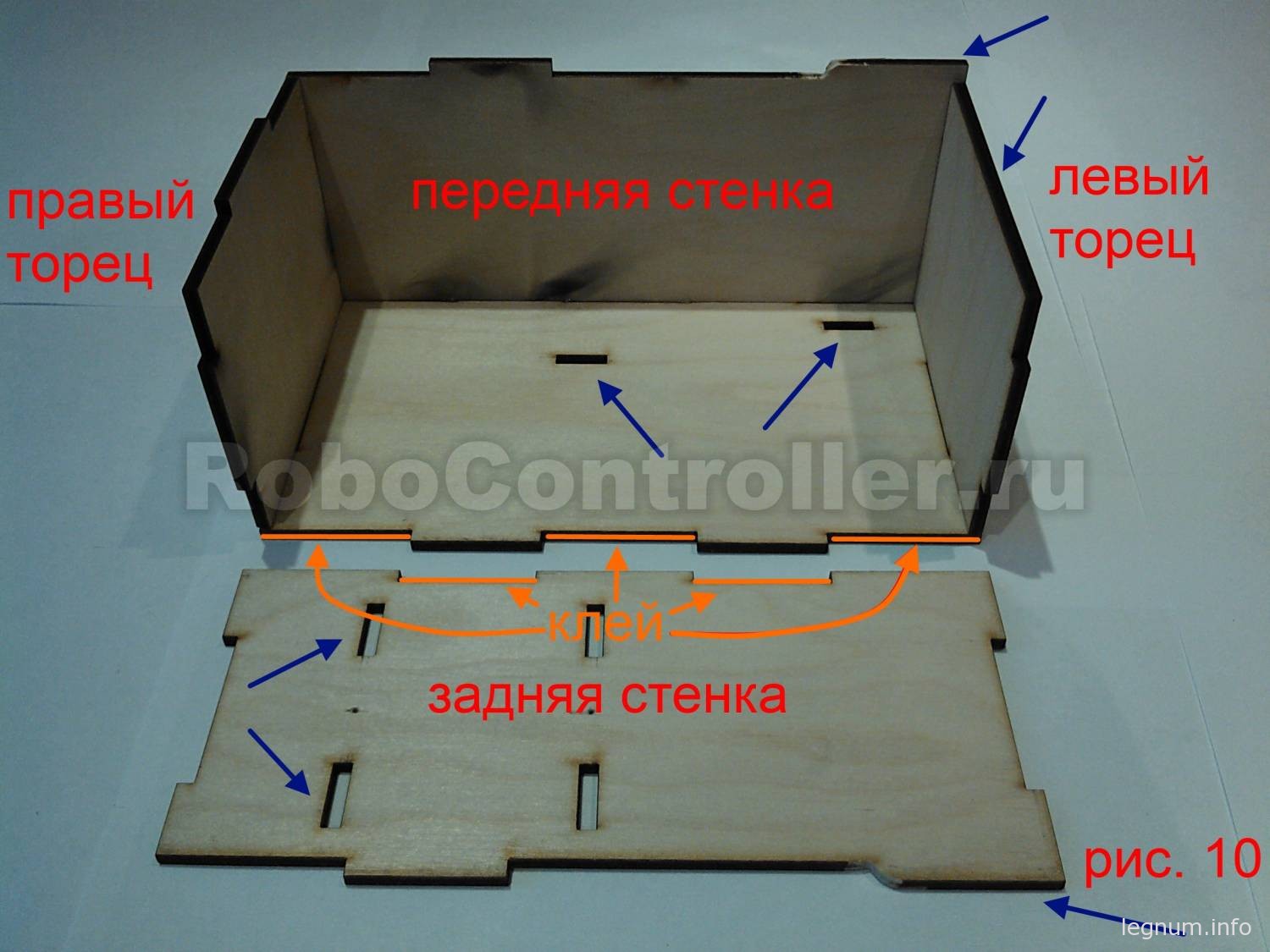
3. Нанесите клей на торцы пазов дна и передней стенки (рис. 9). Прижмите переднюю стенку и дождитесь высыхания клея. У вас должно получиться так (видео 3). - Склейте скотчем: дно, левый торец, переднюю стенку и правый торец. Нанесите клей на торцы пазов дна и задней стенки (рис. 10).
- Прижмите заднюю стенку соблюдая расположение деталей и дождитесь высыхания клея. Вот что у вас должно получиться (видео 4).
- Со стороны правого торца, намажьте клеем торцы пазов задней стенки, дна и передней стенки. Аккуратно вставьте правый торец в пазы и дождитесь засыхания клея.
- Левый торец приклеивать не нужно.


Вот что должно получится:
Левая верхняя крышка:
- Возьмите корпус, левую крышку и 2 крючка (рис. 11).
- Приклейте крючки. Крючок в корпусе должен быть направлен прорезью в сторону левого торца коробки. Крючок на крышке должен быть направлен прорезью в сторону правого торца (рис. 12), (рис. 13).
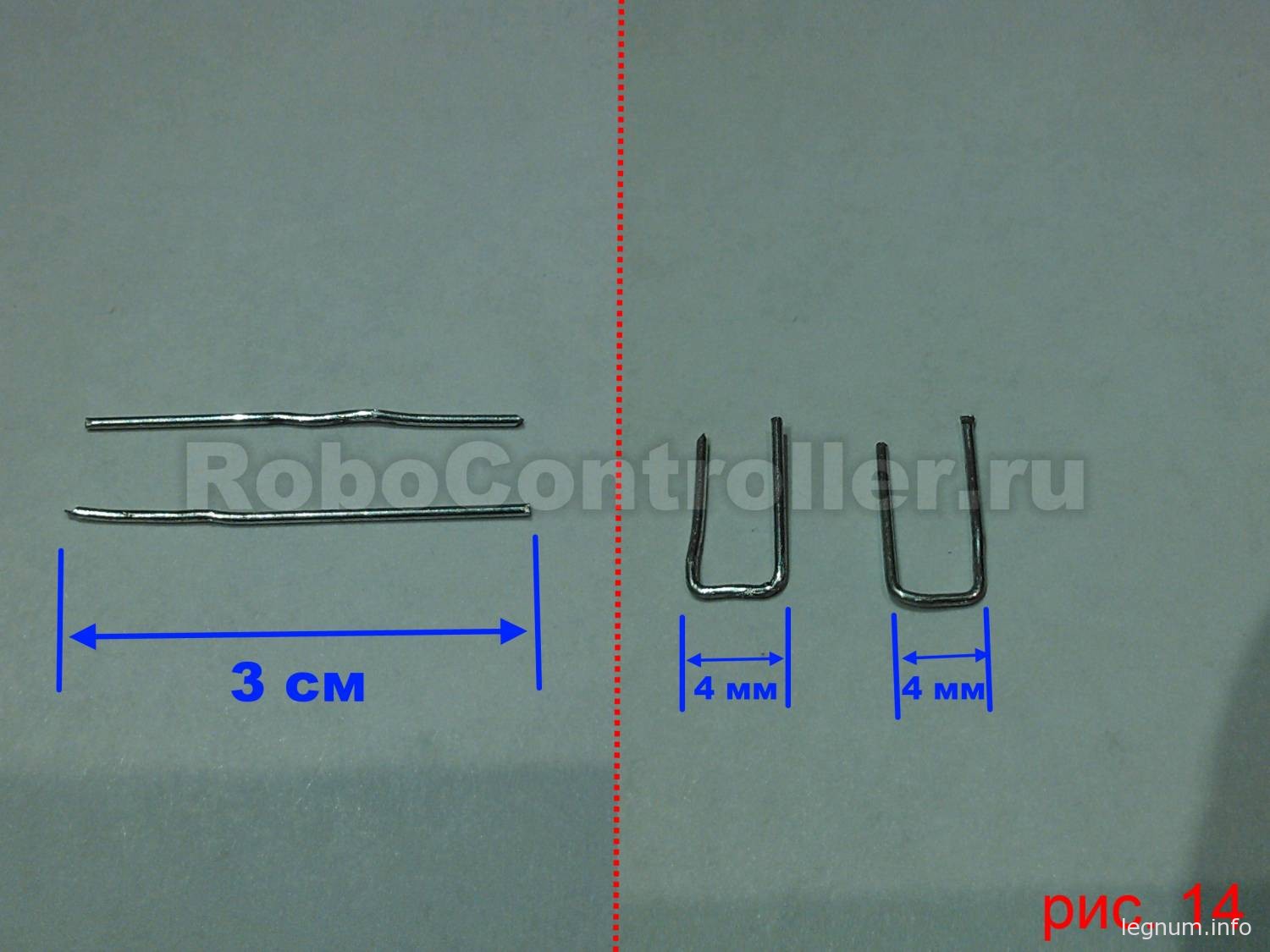
- Возьмите канцелярскую скрепку, распрямите её и откусите кусачками два куска по 3 см. Загните оба отрезка как показано на рисунке (рис. 14).
- Уберите стенку левого торца, приложите правую верхнюю крышка как показано на рисунке (рис. 13) и просверлите отверстие (сверло 1 мм) в указанных на картинке местах (рис. 15). Сверло должно пройти сквозь боковые стенки и в середину торца верхней крышки.
- Вставьте в просверленные отверстия скобы из канцелярской скрепки (рис. 16).
- Загните каждую скобу так, чтобы «свободный» конец был направлен внутрь корпуса (рис. 17).
- Возьмите резинку для денег, сложите её в двое, закрутите на нужное число оборотов и наденьте на крючки (рис. 18).







Вот что у вас должно получиться:
Крепление серво, рычага, тумблер, завершение сборки:
- Возьмите крепление для серво и сам сервопривод (рис. 19).
- Вставьте серво в прямоугольное отверстие, при этом вал серво должен быть ближе к верхнему краю крепления. Нижняя часть крепления обозначена отверстием (рис. 20, рис. 21). Закрепите серво шурупами или винтиками M2 (пример на фото), предварительно просверлив отверстия (сверло 2 мм).
- Возьмите две части рычага (рис. 22), склейте их или соедините винтиками (пример на фото). Прикрутите качалку от серво точно также, как на фото (рис. 23).
- Поставьте серво в положение 0 градусов и закрепите рычаг на серво. Прямая часть рычага должна быть направлена вниз (рис. 24).
- Возьмите тумблер, провода штекера и сопротивление 10 кОм. Припаяйте провода и сопротивление как на картинке (рис. 25).
- Закрепите тумблер в правой верхней крышке как на картинке (рис. 26).
- Если у вас не Arduino Mega, тогда изготовьте вот такой провод (рис. 27).
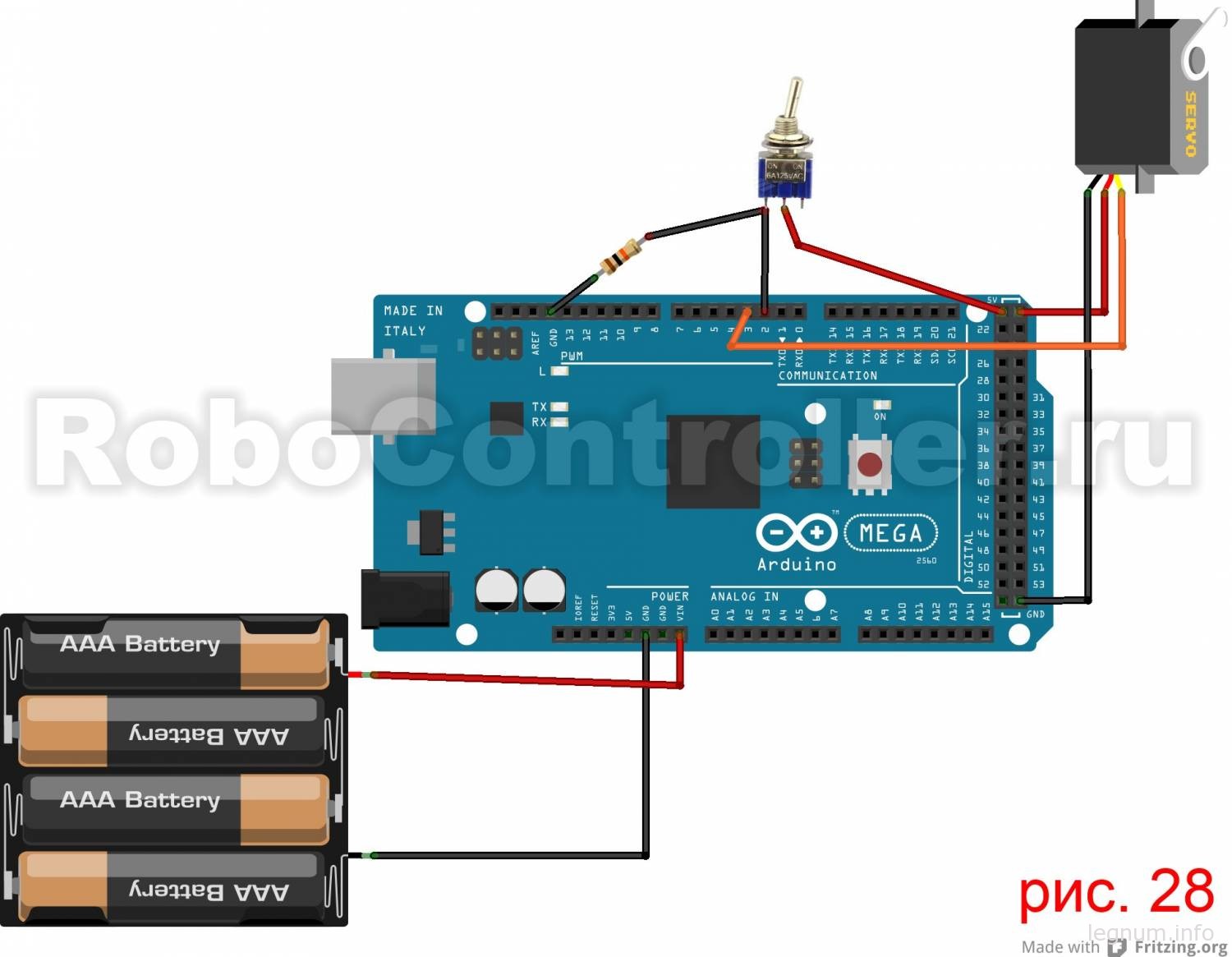
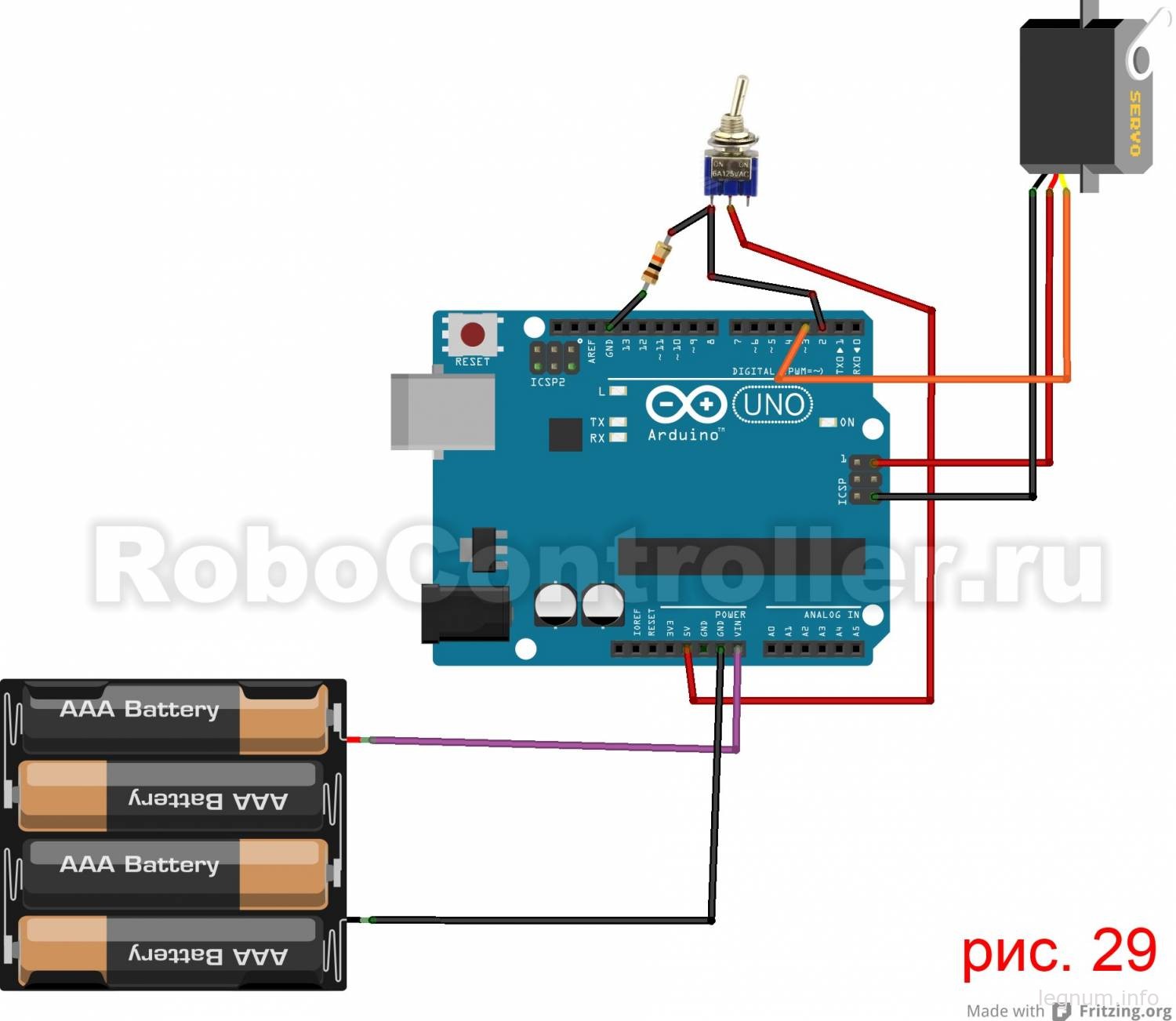
- Подключите все компоненты к ардуино, смотрите схему (рис. 28, рис. 29, рис. 30).
- Закрепите Ардуино. Установите крепление с серво таким образом, чтобы вал серво был направлен в сторону задней стенки. Блок с батареями можно разместить на стенке левого торца (рис. 31, рис. 32).
- Закрепите верхнюю правую крышку и левый торец при помощи шурупов. Предварительно, под шурупы просверлите отверстия (сверло 2 мм) (рис. 33).













Вот что у вас должно получиться:
Настройка программы:
Откройте код для URoboBox. В самом начале кода, вы увидите раздел настроек.
- Укажите пины на которых подключены серво (пин 3) и тумблер (пин 2).
- Укажите минимальное положение рычага, по умолчанию 10. Максимальное положение рычага, в диапазоне от 90 до 110. Укажите такой градус, при котором в максимальном положении рычаг будет выключать тумблер.
- Укажите пин для светодиода подсветки.
- Выберите режим работы URoboBox, 1 – Выбор движений в случайном порядке, 2 – Движения идут по порядку.
- Общее число движений. Измените это число, если вы добавляли свои движения, укажите общее число движений.
- Настройте движение Shake, читайте описание в коде.
Файлы проекта:
Код URoboBox для Arduino (СКАЧАТЬ)
Архив с файлом чертежей URoboBox для лазерной резки. Файл создан в программе CorelDRAW X6. (СКАЧАТЬ)
А еще есть робот неваляшка
Робот-собака своими руками:
Радио-управляемая машина на ТВ пульте:
Источник
Отправить ответ