
Как используются датчики современных смартфонов в исследованиях, я озадачился этим вопросом при успользовании приложения “Шумометр”.
В частности – насколько показания программы “шумометр” на смартфоне будут соответствовать специализированному устройству.
В данной статье описываются функции современных мобильных устройств, таких как смартфоны и планшетные компьютеры, которые можно использовать для оценки параметров, например, при проведении экспериментов или первичном осмотре места происшествия, а так же рассматриваются некоторые заблуждения, связанные с подобными программами.
С целью оценки некоторых параметров при проведении экспериментов или при осмотре места происшествия на первых этапах расследования факта иногда можно использовать смартфон или планшетный компьютер. Эти устройства компактны, широко распространены, и в некоторых случаях позволяют оценить необходимые параметры с достаточной точностью.
Как и при использовании любого другого инструмента, для обеспечения максимальной эффективности применения современных мобильных устройств при расследовании и исследовании НОФ, а также во избежание ошибочных выводов из их показаний, необходимо четко представлять себе принцип и особенности функционирования интегрированных в них датчиков.
В этой статье мы попытаемся описать принцип работы, функциональные ограничения и возможные применения наиболее распространенных датчиков и функций современных мобильных устройств. Кроме этого, мы приведем примеры использования широко распространенных программ, основанных на обработке показаний этих датчиков.
Датчики современных мобильных устройств
Современные мобильные устройства (смартфоны, планшетные компьютеры, а также некоторые медиаплееры и даже фотоаппараты) выполняют огромное количество функций помимо тех, для которых непосредственно предназначены. Так, с помощью сотового телефона можно делать фотографии и выходить в Интернет, с помощью фотоаппаратов – размещать изображения в социальных сетях и т.п. Кроме того, мобильные устройства являются самой активно развивающейся игровой платформой. Все это приводит к тому, что разработчики мобильных устройств постоянно расширяют аппаратные возможности своих продуктов, добавляя в них компоненты, применение которым находится далеко не сразу.
В одном из классов таких компонентов являются разнообразные датчики и сенсоры, которыми напичканы современные мобильные устройства. И если часть из них (такие, как датчик освещенности или приближения) помогают устройству выполнять свои основные функции, то потенциал некоторых раскрывается только при использовании специального программного обеспечения.
В состав современных мобильных устройств могут входить следующие датчики:
- акселерометр;
- гироскоп;
- датчик освещения;
- датчик приближения;
- барометр;
- датчики температуры аппарата и окружающей среды;
- измеритель относительной влажности;
- датчик звука (микрофон);
- фотокамера;
- электронный компас;
- система спутниковой навигации (GPS/ГЛОНАСС);
- и т.д.
Многие из этих датчиков могут использоваться при обследованиях мест происшествия необъясненных фактов, однако, как уже упоминалось выше, для квалифицированного применения необходимо понимать принцип их работы, а также ограничения, накладываемые реализацией датчиков в мобильном устройстве, ведь все эти датчики реализуются в виде чрезвычайно маленьких и энергоэффективных микросхем.
Рассмотрим назначение и принцип действия наиболее интересных нам датчиков.
Датчики движения (акселерометр, гироскоп)
Как следует из названия, акселерометр предназначен для измерения ускорения. В мобильных устройствах акселерометр применяется в основном для определения наличия линейного ускорения (например, в тех случаях, когда устройство падает или его трясут). Гироскоп применяется для определения углового ускорения – например в тех случаях, когда устройство поворачивают или переворачивают. Эти компоненты современных мобильных устройств находят большое применение, прежде всего, в игровых приложениях.
Принцип действия этих компонентов основан на применении микроэлектромеханических систем (MEMS).
На сегодняшний день наиболее популярны датчики движения, основанные на конденсаторном принципе. Подвижная часть системы – классический грузик на подвесах. При наличии ускорения грузик смещается относительно неподвижной части акселерометра. Обкладка конденсатора, прикрепленная к грузику, смещается относительно обкладки на неподвижной части. Емкость меняется, при неизменном заряде меняется напряжение – это изменение можно измерить и рассчитать смещение грузика. Откуда, зная его массу и параметры подвеса, легко найти и искомое ускорение.

Зачастую современные MEMS-гироскопы устроены идентично акселерометрам. Просто в них значения ускорений по осям пересчитываются в значения углов поворота – конструкция примерно та же, но на выходе другая величина. Однако встречаются и гироскопы, устройство которых “заточено” именно под вращение.
Помимо конденсаторных датчиков, существуют MEMS-акселерометры, использующие иные принципы. Например, датчики, основанные на пьезоэффекте. Вместо смещения обкладок конденсатора, в акселерометрах такого типа происходит давление грузика на пьезокристалл. Основной принцип тот же, что и в пьезозажигалках – под воздействием деформации пьезоэлемент вырабатывает ток. Из значения напряжения, зная параметры системы, можно найти силу, с которой грузик давит на кристалл – и, соответственно, рассчитать искомое ускорение.

Электронный уровень
Существуют программы, которые позволяют реализовать в мобильном устройстве функциональность таких строительных приборов, как отвес и уровень, основываясь на данных, получаемых от акселерометра и гироскопа.

При использовании подобного программного обеспечения необходимо иметь в виду, что показания цифровых датчиков в данном случае заведомо менее точные, чем реального «аналогового» инструмента. Датчики, расположенные в мобильном устройстве, предназначены, прежде всего, для отслеживания поворота экрана в играх и других приложениях, при этом от них не требуется точность, необходимая для проведения строительных работ. Таким образом, эти датчики, в отличие от реальных инструментов, не калибруются на предприятии-изготовителе, а допуски их размещения внутри устройства могут быть слишком большими для обеспечения приемлемой точности.
Для некоторых моделей мобильных устройств существует программное обеспечение, позволяющее откалибровать эти датчики. Процесс калибровки проводится путем расположения устройства на заранее выровненной с помощью реальных инструментов поверхности. Программное обеспечение записывает в память устройства показания датчиков, соответствующие нулевым отклонениям от горизонтали по каждой из осей, и эти значения в дальнейшем используются при расчете уровня. Такая процедура позволяет значительно повысить точность показаний виртуального прибора, однако ее действие является недолговечным и может быть прервано различными сторонними воздействиями, начиная от механических ударов и заканчивая нахождением в сильных электромагнитных полях.
Микрофоны и датчики давления
Эти компоненты также построены на основе MEMS-элементов.
Устроены они – проще некуда. Принципиально важных элементов в таком микрофоне всего два: это гибкая обкладка – мембрана, и более толстая, неподвижная обкладка. Под воздействием давления воздуха мембрана смещается, изменяется емкость между обкладками – при постоянном заряде изменяется напряжение. Эти данные пересчитываются в амплитуды и частоты звуковой волны.

Чтобы минимизировать влияние давления воздуха на неподвижную обкладку, эта обкладка перфорируется. Кроме того, под ней делается сравнительно большая ниша с обязательным вентиляционным отверстием. Идея в том, что единственным подвижным элементом в системе в идеале должна быть мембрана – и только она. Как и в случае с акселерометрами, здесь может быть использован пьезоэффект – в этом случае под мембраной ставится пьезокристалл. Дальше – как и в случае пьезоакселерометров: давление воздуха передается мембраной на пьезоэлемент, под этим воздействием кристалл вырабатывает ток. Напряжение измеряется и переводится в амплитуду и частоту звука.
То, что годится для звука, подходит и для измерения давления в иных областях. Похожие на микрофоны MEMS-системы могут использоваться в качестве датчиков давления.
Шумомер
Датчики звука, которые по сути представляют собой микрофоны мобильных устройств, вполне логично использовать в качестве шумомера – прибора, предназначенного для измерения уровня звука. По сути, необходимо установить зависимость уровня сигнала на выходе микрофона от амплитуды акустических колебаний около его мембраны (назовем эту зависимость передаточной характеристикой). Однако сделать это не так уж и просто, несмотря на то, что соответствующее программное обеспечение существует.
При попытке измерить уровень шума с помощью мобильного устройства мы сталкиваемся с двумя проблемами. Первая проблема распространяется на все датчики, расположенные в мобильных устройствах и заключается в том, что они не являются измерительными приборами. Применительно к микрофонам это означает, прежде всего, достаточно большой разброс параметров, влияющих на передаточную характеристику микрофона. Проще говоря, даже микрофоны одного производителя, установленные в устройства одной модели, при измерении одинакового уровня шума будут выдавать различные результаты. Теоретически можно было бы откалибровать микрофоны, однако этого никто не делает.
Вторая проблема носит более специфичный характер и сводит на нет возможную пользу от калибровки микрофонов. Дело в том, что практически во всех современных мобильных устройствах применяются адаптивные алгоритмы подавления шума. Эти алгоритмы предназначены для повышения качества передачи основной звуковой информации – речи, и основаны на повышении отношения полезный сигнал / шум в получаемом от микрофона сигнале. Таким образом, сигнал, идущий от микрофона, подвергается сложным нелинейным преобразованиям в результате цифровой обработки, и уровень шума, который пытается измерить программа, реализующая шумомер, имеет мало общего с реальным уровнем на входе микрофона. Теоретически, опять же, алгоритмы шумоподавления можно отключить, однако, учитывая большое разнообразие мобильных устройств на рынке, сомнительно предположить, что авторы программного обеспечения предусмотрели отключение этих алгоритмов во всех устройствах.
В результате всего вышесказанного можно сделать вывод, что шумомер в мобильном устройстве может выдавать результаты, не имеющие совершенно никакого отношения к реальному уровню шума, и рассчитывать на его показания при проведении исследований нельзя.
Звуковой спектроанализатор
Спектроанализатор предназначен для отображения распределения энергии принимаемого звукового сигнала (то есть звуковой картины вокруг смартфона) по частотам.

Применение спектроанализатора позволяет избежать проблемы с разбросом передаточных характеристик микрофонов, ведь в результатах его работы исследователя интересует не абсолютное значение уровня сигнала, а его распределение по частотам. Если бы не было нелинейных искажений сигнала, то результат спектрального анализа можно было бы рассматривать как объективное отражение окружающей мобильное устройство акустической картины, пусть и смасштабированное с неизвестным коэффициентом. Однако, как уже говорилось выше, сигнал с микрофона подвергается адаптивной обработке, искажается, в результате чего распределение энергии по частотам меняется. Стандартный телефонный канал, предназначенный для передачи речевой информации, занимает полосу от 300 до 3400 Гц, что позволяет различать голоса по тембру и ограничить помехи и шумы, возрастающие с увеличением полосы [6]. Уровни сигналов, выходящих за эту полосу, уменьшаются, так как априори считается, что эти сигналы являются помехами при разговоре.
Таким образом, звуковой спектроанализатор, реализованный в мобильном устройстве, также как и шумометр, получает на вход сигнал, не отражающий реальную акустическую обстановку, и не может использоваться при проведении серьезных исследований.
Датчик относительной влажности
Одним из самых современных элементов, предназначенных для измерения относительной влажности воздуха в мобильных устройствах, является микросхема Si7005 производства компании Silicon Labs.
Для измерения относительной влажности используется полимерная диэлектрическая пленка с высокой диэлектрической постоянной, сформированная на кристалле, и схема смешанной обработки сигнала, изготавливаемая по техпроцессу CMOS. Датчики выпускаются в корпусах типа QFN размерами 4 x 4 мм. Зависимость абсолютной погрешности измерения относительной влажности от измеряемого значения описывается графиком:

Как видно из графика, при измерении относительной влажности, величина которой составляет менее 80 %, датчик обеспечивает постоянную погрешность на уровне ± 4,5 %. При повышении влажности выше 80 % погрешность начинает линейно расти и достигает ± 7 % при стопроцентной влажности.
Кроме влажности, данная микросхема также обеспечивает измерение температуры с точностью ± 0,5° С.
Психрометр
Описанная технология в сегменте мобильных устройств является достаточно новой, и автору пока еще не попадалось ни одного устройства, снабженного датчиком влажности. Однако как только такие устройства появятся, появится и программное обеспечение, позволяющее считывать показания этих датчиков. Судя по характеристикам микросхемы, она может обеспечить приемлемую для большинства исследовательских задач точность. Однако при измерениях необходимо будет учитывать, что сенсор находится непосредственно на самой микросхеме, в результате чего должно пройти некоторое время от помещения устройства в исследуемую среду до того момента, когда можно будет получить адекватные результаты измерения. Величину этой задержки можно будет выяснить лишь экспериментально для каждого конкретного устройства.
Электронный компас
Практически в каждое современное мобильное устройство встроена система навигации, одной из составных частей которой является электронный магнитный компас. Физически в устройстве он реализован в виде микросхемы, принцип работы которой основан на эффекте Холла – явлении возникновения поперечной разности потенциалов (напряжения) при помещении проводника с постоянным током в магнитное поле. Величина этого напряжения зависит от ориентации проводника относительно линий магнитной индукции магнитного поля. Таким образом, измеряя поперечное напряжение в проводнике, созданное магнитным полем Земли, можно определить его положение относительно севера, а значит, и положение самого мобильного устройства.
Следует иметь в виду, что точность и даже работоспособность такого компаса зависит от большого количества факторов. Магнитное поле Земли достаточно слабое, поэтому чувствительность микросхемы должна быть высокой. Однако это приводит к тому, что она, будучи помещенной внутрь устройства, напичканного другими электронными компонентами, становится подверженной воздействию большого количества помех, снижающих точность измерений.
Кроме того, на показания компаса очень большое влияние оказывают близко расположенные металлические предметы, в том числе детали самого мобильного устройства, искажающие форму магнитного поля вблизи микросхемы. Достаточно часто (особенно в недорогих моделях устройств, при разработке которых не было выделено достаточное количество инженерных ресурсов на разработку системы навигации) встречается совершенно неработоспособный компас, отображающий случайное положение устройства относительно севера.
Точность измерений современных электронных компасов в мобильных устройствах достигает единиц градусов (в среднем 3-5). При этом максимальную точность показаний они обеспечивают при горизонтальном расположении устройства. При отклонении от горизонтали по любой из осей ошибка определения направления на север начинает увеличиваться, достигая своего максимума при расположении устройства перпендикулярно к поверхности Земли.
Наконец, еще одной особенностью таких компасов является способность намагничиваться. После длительного нахождения вблизи ферромагнетика, особенно намагниченного, компас начинает выдавать значение направления с постоянной ошибкой. Для того, чтобы избавиться от подобного эффекта, необходимо «размагнитить» компас (обычно эта процедура производится при перезагрузке мобильного устройства), а потом провести процедуру его калибровки по описанной производителем методике.
Таким образом, можно сформулировать рекомендации, которым необходимо следовать при использовании электронного магнитного компаса:
- перед началом использования провести сравнение показаний с показаниями обычного туристического компаса, чтобы убедиться в его принципиальной работоспособности;
- перед началом использования компаса размагнитить его и откалибровать;
- при работе держать мобильное устройство параллельно поверхности Земли;
- избегать близости к устройству массивных предметов из ферромагнитных материалов (связок ключей и т.п.);
- надежными считать показания компаса, снятые на открытой местности (вдали от больших металлических предметов, таких как заборы, ворота и т.п.).
Система спутниковой навигации GPS/ГЛОНАСС
Собственно, сами системы спутниковой навигации существуют независимо от мобильных устройств и представляют собой достаточно большое количество спутников, расположенных на геостационарных орбитах вокруг Земли. Каждый из этих спутников излучает радиосигнал. В мобильные устройства встраивают приемник и антенную систему, обеспечивающие возможность приема радиосигналов этих спутников, а также программное обеспечение, позволяющее по этим сигналам рассчитать текущие координаты устройства.
В настоящий момент существует только две функционирующие глобальные системы спутниковой навигации:
- GPS (Global Positioning System – система глобального позиционирования) – разработана, реализована и эксплуатируется Министерством обороны США. В данный момент насчитывает 31 рабочий спутник. Типичная точность современных GPS-приёмников в горизонтальной плоскости составляет примерно 6-8 метров при хорошей видимости спутников и использовании алгоритмов коррекции. На территории США, Канады, Японии, КНР, Европейского Союза и Индии имеются станции WAAS, EGNOS, MSAS и т. д. передающие поправки для дифференциального режима, что позволяет снизить погрешность до 1-2 метров на территории этих стран. При использовании более сложных дифференциальных режимов, точность определения координат можно довести до 10 см. Первоначально GPS разрабатывалась как чисто военный проект. Но после того, как в 1983 году вторгшийся в воздушное пространство Советского Союза самолёт Корейских Авиалиний с 269 пассажирами на борту был сбит из-за дезориентации экипажа в пространстве, президент США Рональд Рейган с целью не допустить в будущем подобные трагедии разрешил частичное использование системы навигации для гражданских целей. Во избежание применения системы для военных нужд точность была уменьшена специальным алгоритмом
- ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система) – советская и российская спутниковая система навигации, разработана по заказу Министерства обороны СССР. По состоянию на 5 марта 2013 г. всего в составе системы находится 29 спутников, из них используется по назначению 24. Заявленная точность определения координат 3-6 м. [11]
В процессе разработки и построения находится европейская система спутникового позиционирования ГАЛИЛЕО, однако ожидается, что она будет введена в эксплуатацию лишь в 2014-2016 годах. [12]
Единственным назначением глобальных систем спутникового позиционирования является определение координат, скорости и направления движения абонентского устройства, а также получение им сигнала точного времени. Все остальные функции, предоставляемые современными мобильными устройствами (навигация, трекеры, поиск на карте, «дополненная реальность» и т.п.) являются результатом программной обработки получаемых от систем навигации данных и не имеют никакого отношения к самим этим системам.
Точность определения координат при использовании спутниковых систем навигации очень сильно зависит от количества спутников, сигналы которых принимает абонентское устройство. Кроме этого, точность сильно зависит от открытости пространства, от высоты используемых спутников над горизонтом. В приполярных областях точность значительно снижается. При этом одновременное использование обеих навигационных систем уже сейчас даёт существенный прирост точности. Европейский проект EGNOS, использующий сигналы обеих систем, даёт точность определения координат на территории Европы на уровне 1,5-3 метров.
Главным недостатком спутниковых систем навигации является необходимость расположения мобильного устройства в зоне доступности для радиосигналов, посылаемых спутниками. В закрытых помещениях, (не только в пещерах, зачастую даже в зданиях на удалении нескольких метров от окна) эти сигналы либо отсутствуют полностью, либо количества доступных спутников недостаточно для определения координат устройства. Указанная выше точность достигается лишь под открытым небом.
Кроме спутниковых систем навигации, современные мобильные устройства предоставляют и другие способы определения своих текущих координат. Так, технология A-GPS позволяет приблизительно определять координаты устройства по сигналам базовых станций сотовых систем.
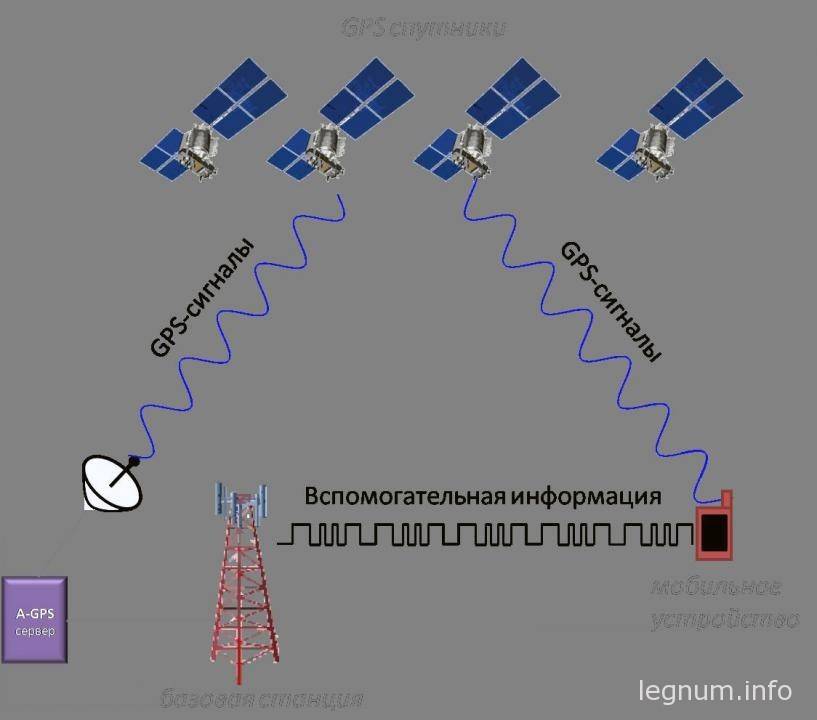
Технология LBS (Location-based service) позволяет определять местоположение устройства, используя информацию о доступных точках доступа WiFi. Точность определения координат с использованием этих технологий обычно составляет не менее 50 м, а вот скорость движения устройства не определяется вовсе. При этом основной недостаток этих методов определяется принципом их действия: для работы A-GPS устройство должно быть зарегистрировано в сети сотового оператора, а для использования LBS необходим доступ через Интернет к серверу поставщика соответствующей услуги, на котором хранятся данные о координатах базовых станций WiFi.
В современных мобильных устройствах применяются все возможные технологии определения координат. Их совместное использование позволяет мгновенно определить местоположение устройства практически в любых условиях. Различия заключаются лишь в достигаемой точности и полноте данных, которые зависят от многих факторов – количества доступных сигналов спутниковых систем, возможности доступа к системе сотовой связи, к Интернету. При этом точность определения текущего местоположения устройства колеблется в диапазоне от 50 до 1,5 м.
Позиционирование устройства
Тут можно лишь повторить, что реальная точность определения собственных координат современными мобильными устройствами составляет в среднем 5-10 метров. Таким образом, не имеет смысла использовать их в задачах, которые требуют отслеживания местоположения чего-либо в радиусе менее 100-150 м, в этом случае результаты эксперимента будут чрезвычайно сильно зашумлены случайными флуктуациями системы навигации.
Не стоит также таким способом пытаться определить подвижность объекта – даже при неподвижном мобильном устройстве система навигации будет выдавать координаты с некоторым разбросом, как если бы устройство двигалось в пределах зоны, размер которой определяется погрешностью определения координат в текущих условиях.
Секундомер/таймер
Мобильные устройства используются также для определения временных интервалов. Здесь можно сказать, что точности временной синхронизации устройств более чем достаточно как для определения точного времени, так и для оценки временных интервалов между событиями. При этом необходимо иметь в виду, что попытки оценить длительность интервалов меньших, чем 1 с, будут обладать большими погрешностями, но не в силу ограничений, накладываемых мобильным устройством, а в силу инерционной реакции того, кто проводит эксперимент. Человек физически не способен совершать действия в таких коротких промежутках времени, задержка между событием и реакцией на него человека во много раз превышает погрешность, определяемую параметрами устройства. Для оценки таких коротких интервалов лучше использовать видеозапись события: ее покадровый анализ позволит на порядок повысить точность.
Датчик освещенности
Это один из простейших датчиков, применяемых в современных смартфонах. В основе таких датчиков практически всегда находятся полупроводниковые фотоэлементы – электронные приборы, которые преобразуют энергию фотонов в электрическую энергию. [15]
Напряжение, создаваемое фотоэлементом, пропорционально освещению датчика. Таким образом, с помощью подобных компонентов можно, например, автоматически регулировать яркость экрана устройства в зависимости от внешнего освещения. Собственно, это и является наиболее распространенным вариантом их использования. Возможности применения этих датчиков при расследовании НОФ достаточно малы.
Датчик приближения
Датчик приближения способен определять присутствие объектов в непосредственной близости к устройству без физического контакта. Датчик приближения создаёт электромагнитное поле или электромагнитное излучение (например, инфракрасное), и следит за изменениями поля или анализирует отраженный сигнал. При помощи датчика приближения блокируется сенсорный экран для предотвращения случайных действий или нажатий на экран во время вызова, например, когда смартфон расположен близко к уху, также уменьшается нагрузка на аккумуляторную батарею. [16]
Так же, как и для датчика освещенности, возможность использования датчика приближения при расследовании НОФ крайне мала.
Датчики температуры
Принцип действия датчиков температуры построен на зависимости сопротивления (проводимости) элементов от их температуры: чем выше температура проводника, тем больше его сопротивление. Таким образом, измеряя сопротивление предварительно откалиброванного проводника, можно узнать его температуру. При расположении проводника внутри устройства измеряется внутренняя температура, вблизи его поверхности – внешняя.
Терометр
Если внутренняя температура устройства при исследовании НОФ не имеет значения, то для оценки внешней такие датчики вполне можно использовать. Однако нужно иметь в виду, что максимально точные показания при этом можно получить в том случае, если датчик погружен в среду, температуру которой требуется измерить. Так, если измеряется температура воздуха, то устройство покажет ее достаточно точно без дополнительных действий. Однако если нужно измерить температуру жидкости, то недостаточно будет поднести телефон к ее поверхности – необходимо его в эту жидкость окунуть на некоторое время, чтобы температура датчика сравнялась с измеряемой. Нужно иметь в виду, что далеко не каждое устройство выдержит такое с собой обращение. Однако даже в этом случае погрешность измерения температуры вряд ли будет меньше 1-2 градусов, так как, несмотря на характеристики самого датчика, он не изолирован, а окружающие его компоненты выделяют тепло, что искажает результаты измерений. К тому же будет сильно проявляться зависимость точности от измеряемого значения – все-таки датчики в мобильных устройствах не являются измерительными приборами.
Фотокамера
Фотокамеры есть практически во всех современных мобильных устройствах. Они нашли большое количество применений и используются как для фотографирования, так и для съемки видео, осуществления видеозвонков и т.п.
Главный элемент любой современной цифровой камеры – светочувствительная матрица, предназначенная для преобразования проецированного на неё оптического изображения в аналоговый электрический сигнал или в поток цифровых данных (при наличии АЦП непосредственно в составе матрицы).

В современных мобильных устройствах используются матрицы трех типов:
ПЗС-матрицы (они же CCD). Состоят из светочувствительных фотодиодов, выполнены на основе кремния, используют технологию ПЗС — приборов с зарядовой связью. ПЗС-матрицы были первым поколением светочувствительных матриц, применяемых в мобильных устройствах. В настоящее время идет процесс их вытеснения КМОП-матрицами.
КМОП-матрицы (они же CMOS). Выполнены на основе КМОП-технологии. Каждый пиксел снабжён усилителем считывания, а выборка сигнала с конкретного пиксела происходит, как в микросхемах памяти, произвольно. SIMD WDR матрица, также выполненная на основе КМОП-технологии, имеет в обрамлении каждого пиксела ещё и автоматическую систему настройки времени его экспонирования, что позволяет радикально увеличить фотографическую широту устройства. По данным на начало 2012 года, приборы типа CMOS заняли 92% рынка.
Live-MOS-матрицы. Созданы и применяются компанией Panasonic. Выполнены на основе МОП-технологии, однако содержат меньшее число соединений для одного пикселя и питаются меньшим напряжением. За счёт этого и за счёт упрощённой передачи регистров и управляющих сигналов имеется возможность получать «живое» изображение при отсутствии традиционного для такого режима работы перегрева и повышения уровня шумов.
Как видно, подавляющее большинство современных мобильных устройств использует КМОП-матрицы. Это объясняется их высокой энергоэффективностью, а также низкой стоимостью производства. При этом, как это часто бывает в подобных случаях, несколько страдает качество получаемых изображений: если по параметрам светочувствительности и структурного шума современные КМОП и ПЗС-матрицы практически не отличаются, то тепловой шум в КМОП-матрицах несколько выше. В результате изображения, полученные с помощью КМОП-матриц, более зашумленные (а если при этом применяются автоматические алгоритмы сглаживания, то изображения получаются несколько «замыленными»).
Такие характеристики матриц, как светочувствительность (более коротко чувствительность), отношение сигнал-шум и физический размер пикселя однозначно взаимосвязаны (для матриц, созданных по одной и той же технологии). Чем больше физический размер пикселя, тем больше получаемое соотношение сигнал-шум при заданной чувствительности, или тем выше чувствительность при заданном соотношении сигнал-шум. Физический размер матрицы и её разрешение однозначно определяют размер пикселя. Размер пикселя напрямую определяет такую важную характеристику, как фотографическая широта.
Это все говорит о том, что изображения, полученные с использованием мобильных устройств, в которых из-за жесткого дефицита свободного пространства (за крайне редким исключением) применяются матрицы очень малых размеров, практически никогда не могут иметь качество, сравнимое с изображениями, полученными с помощью полноценных фотокамер. По большей части, достаточно качественные изображения получаются при съемке в дневное время, при умеренном освещении. Во всех других случаях (при недостаточном освещении, при излишнем освещении и т.п.) матрица не способна выдать качественный сигнал, и мобильное устройство пытается повысить качество фотографии с помощью алгоритмов программной обработки. При этом в изображение практически всегда вносятся достаточно сильные искажения.
Кроме того, для повышения светочувствительности матрицы, производители расширяют диапазон длин волн, на которые она реагирует. Подавляющее большинство матриц современных мобильных устройств чувствительно в области ближнего инфракрасного диапазона. В этом можно убедиться, сделав фотографию обычного пульта от телевизора при нажатой на нем кнопке. Таким образом, практически во всех фотографиях с мобильных устройств присутствует часть невидимого человеческим глазом спектра.
Дальномер и т.п.
Существует целый набор программ, позволяющих оценить расстояние до объектов, их линейные размеры (высоту, длину), площадь. Все эти программы основаны на вычислении простейших геометрических пропорций и используют такие компоненты современных мобильных устройств, как камера и датчики положения (акселерометр и гироскоп).
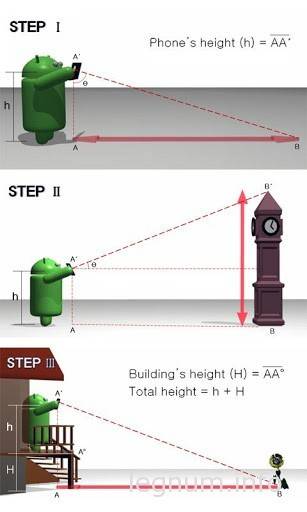
Необходимо иметь в виду, что подобные программы дают достаточно точный результат только в ограниченных условиях применения: в случаях, когда человек стоит на одном уровне с основанием измеряемого объекта, между ними нет неровностей ландшафта и т.п. Во всех остальных случаях (т.е. в реальном применении) погрешность измерений будет достаточно большой.
Заблуждения
Помимо действительно полезных программ, использование которых может помочь в исследованиях НОФ, существует ряд развлекательных приложений, которые имитируют работу прибора, но не предоставляют реальной информации. В качестве примеров самых распространенных из них можно привести следующие:
- рентген;
- тепловизор;
- камера ночного видения;
- счетчик Гейгера
- металлоискатель.
В современных мобильных устройствах отсутствуют компоненты, которые позволили бы реализовать эти функции. Таким образом, результат работы этих виртуальных «приборов» просто имитируется. Так, рентген, тепловизор и камера ночного видения представляют собой приложения, принцип работы которых заключается в искажении изображений, получаемых с камеры устройства, с помощью специальных цифровых фильтров. Результаты такого искажения приведены ниже:



«Счетчик Гейгера» и «металлоискатель» и вовсе просто имитируют показания соответствующих приборов, основываясь на генерируемых ими же случайных данных.
Вывод
Современные мобильные устройства вобрали в себя практически все достижения современных технологий, от микроэлектромеханических систем до спутниковых систем глобального позиционирования. Эти устройства предоставляют исследователю богатый арсенал инструментов, которые могут ему помочь в работе. Однако пользоваться им нужно аккуратно, четко представляя себе принцип работы каждого компонента и особенности его использования в конкретных условиях.
Прежде чем приступать к использованию большинства описанных в этой статье функций, необходимо определить адекватность показаний датчиков устройства, сравнив их с показаниями реальных приборов. В ряде случаев могут потребоваться дополнительные действия по калибровке датчиков, которые смогут значительно повысить точность их показаний.
В одной статье невозможно описать весь спектр функций, предоставляемых современными мобильными устройствами. Их сотни, и каждый день появляются все новые. Необходимый набор каждый исследователь составляет себе индивидуально, в зависимости от знаний, привычек и потребностей, однако в каждом из используемых инструментов он должен быть уверен на все 100 %.
Список источников
- MEMS: микроэлектромеханические системы, часть 1
- MEMS: микроэлектромеханические системы, часть 2
- MEMS: микроэлектромеханические системы, часть 3
- Использование смартфонов в исследовании аномальных явлений
- Spectral Audio Analyzer (Google Play)
- Особенности защиты при передаче речевых сигналов
- Silicon Labs объединяет в микросхеме Si7005 датчики относительной влажности и температуры
- Si7005 Data Sheet – Silicon Laboratories Inc.
- Эффект Холла
- GPS
- ГЛОНАСС
- ГАЛИЛЕО
- A-GPS
- Location-based service
- Фотоэлементы
- Датчик приближения
- Светочувствительная матрица
- ПЗС-матрица
- КМОП-матрица
- Технология CMOS продолжает вытеснять CCD в датчиках изображения
- Live-MOS-матрица
- Дальномер – Smart Measure (Google Play)
Статья найдена на просторах интернета, если Вы ее автор, напишите и мы укажем ссылку на Вас.
Отправить ответ